IT技術を活用し、従来の農業機械(圃場機械)の自律走行や自律作業によって,耕うん,整地,播種,施肥,害虫防除,除草、収穫などの一連の農作業を安全に遂行できる農作業ロボットシステムの開発を行う。また、農業管理のためのUAVと赤外線カメラ等によるリモートセンシングシステムの開発を行う。
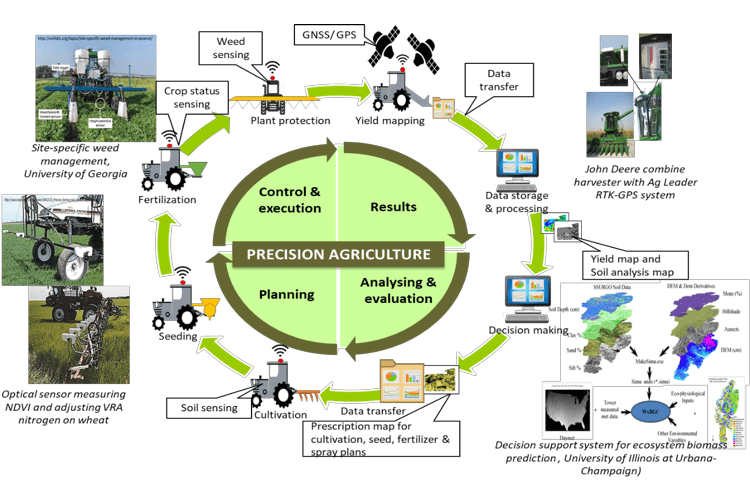
- 精密農業のコンセプト
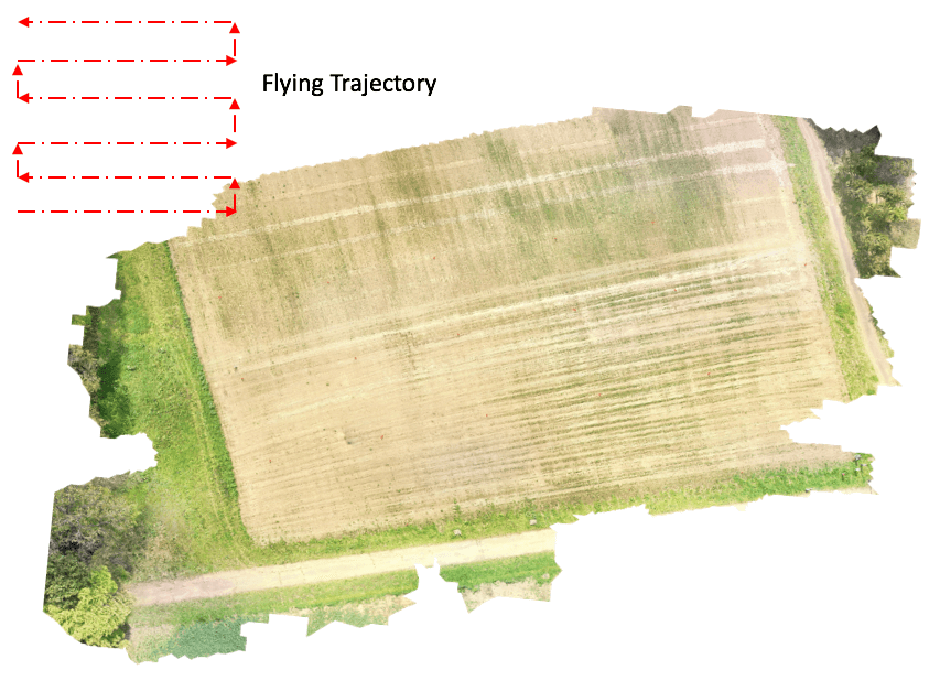
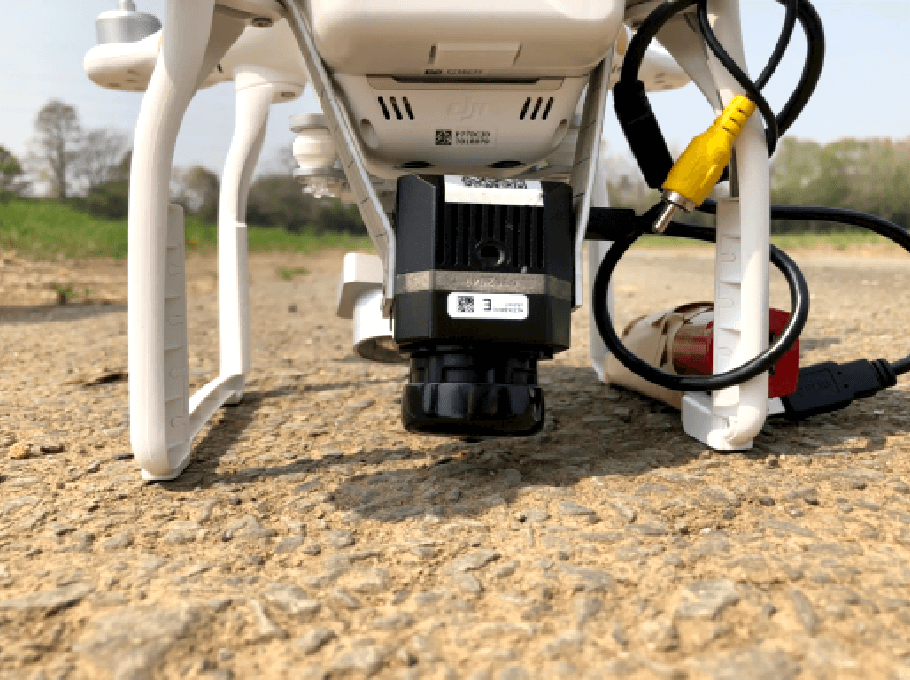
- 農業管理のためのUAVと
赤外線カメラ等による
リモートセンシングシステム 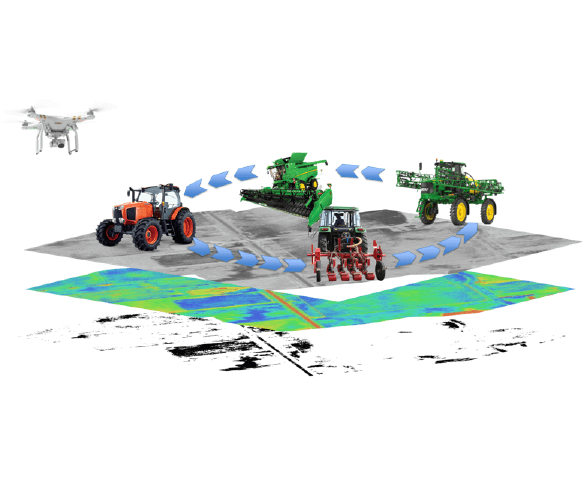
- 通常走行用の
自律走行トラクタ 
- 丘陵地を想定した
クローラ型自律走行トラクタ 
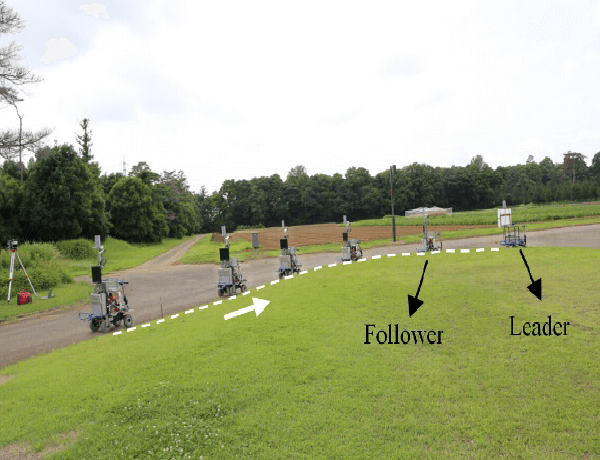
- 先行車両の軌跡追従による
農業用追従システム 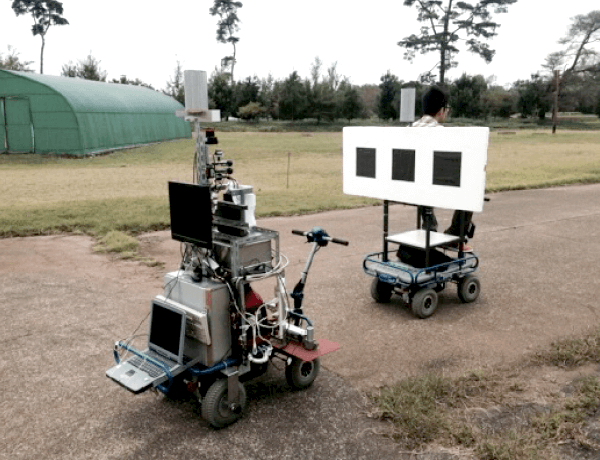

- 圃場の水分量、作物生育情報を
把握するための
ドローンによる熱画像取得